Cetus is an autonomous fishing robot revolutionizing bottom trawling. Instead of destructively plowing through the seabed, the robot lures the fish into the net. With sensors and flaps the catch gets sorted during the fishing process, releasing bycatch instantly and in their natural habitat. The sensors monitor and analyse the seabed, the water and the biomass over long periods of time. This data provides the basis for sustainable and responsible fishing.
The project was exhibited in Berlin and nominated for the german federal award ecodesign 2020 Award.
#semesterproject
#exhibition
#eatinganimalsinthefuture
#bottomtrawling
#robot
#procreate
#fusion360
#keyshot3d

INSPIRATION

Map of german bottom trawling area in the northern sea for turbot and common sole.
The name of this project was eating animals in the future. The claim was that eating animals has become a massive problem for the environment, animals and our health. Based on the fact that humans will eat animals in the future, the goal was to conceptualize another understanding on how we keep and utilize animals.
Based on my background in fisheries and the North Sea, I focused on bottom trawling, which is a famous fishing style in the northern and Baltic Sea.
Bottom trawling has two problems: sustainably destroying the seabed and having a lot of bycatch. My goal for this project was to reduce or eliminate these problems with an innovative solution.

An autonomous underwater vehicle.
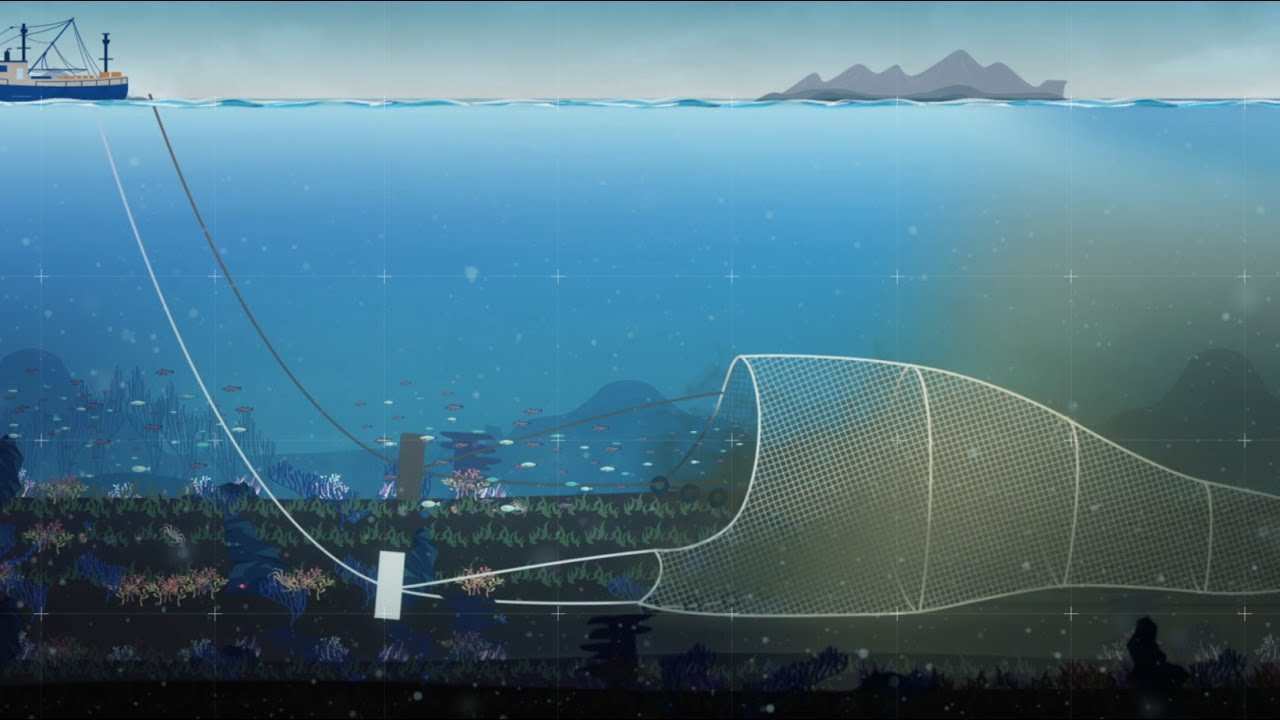
Traditional bottom trawling.

Traditional bottom trawling net.
»Bottom trawling ‘strip-mines’ the ocean floor – a single pass of huge metal trawl net doors, ropes, and rollers leaves deep gouges in the seabed and scoops up or crushes any creatures in its path, including centuries-old corals that give life, food and shelter to vast numbers of species.«
Greenpeace.org 2015.

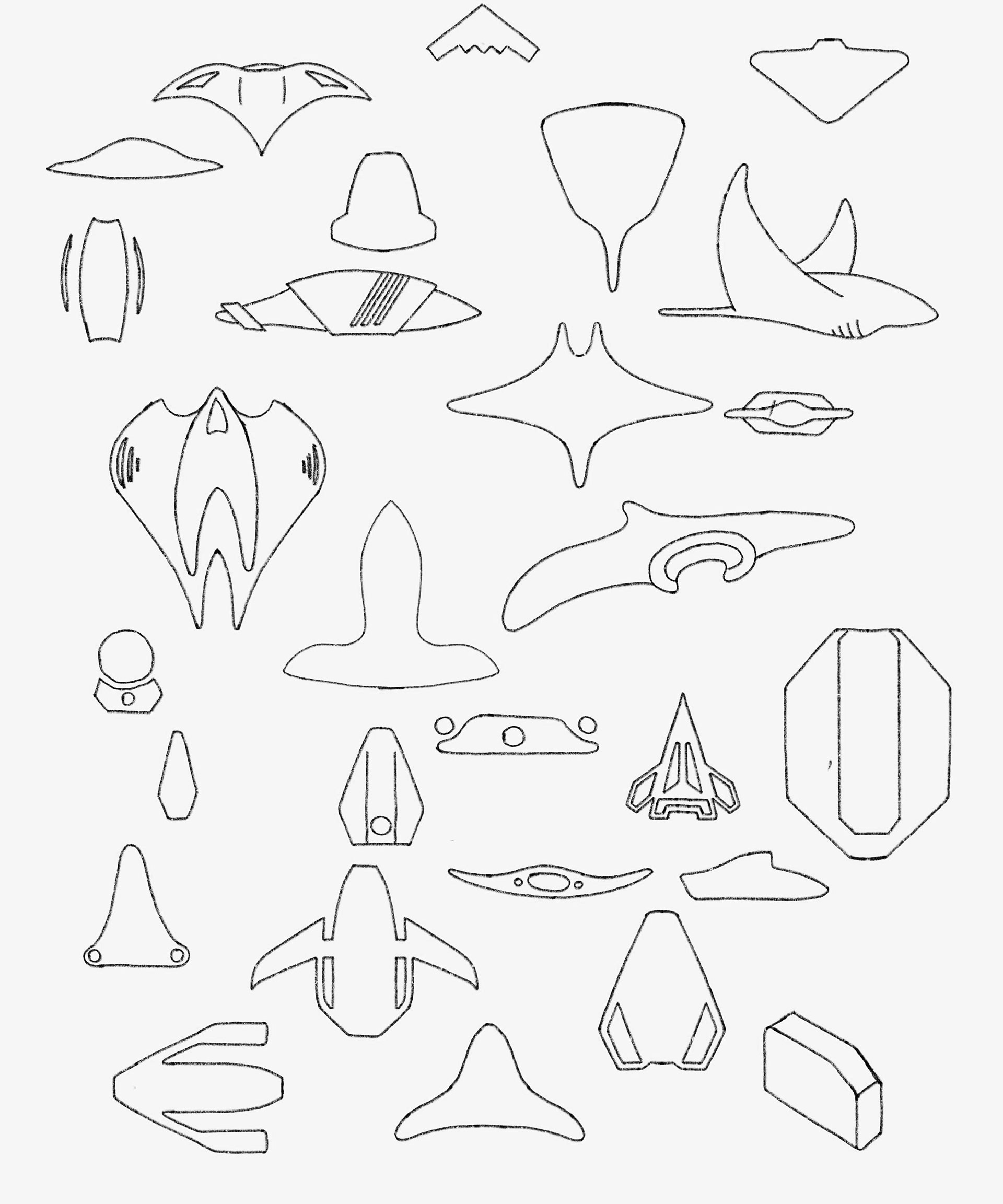
SKETCHES
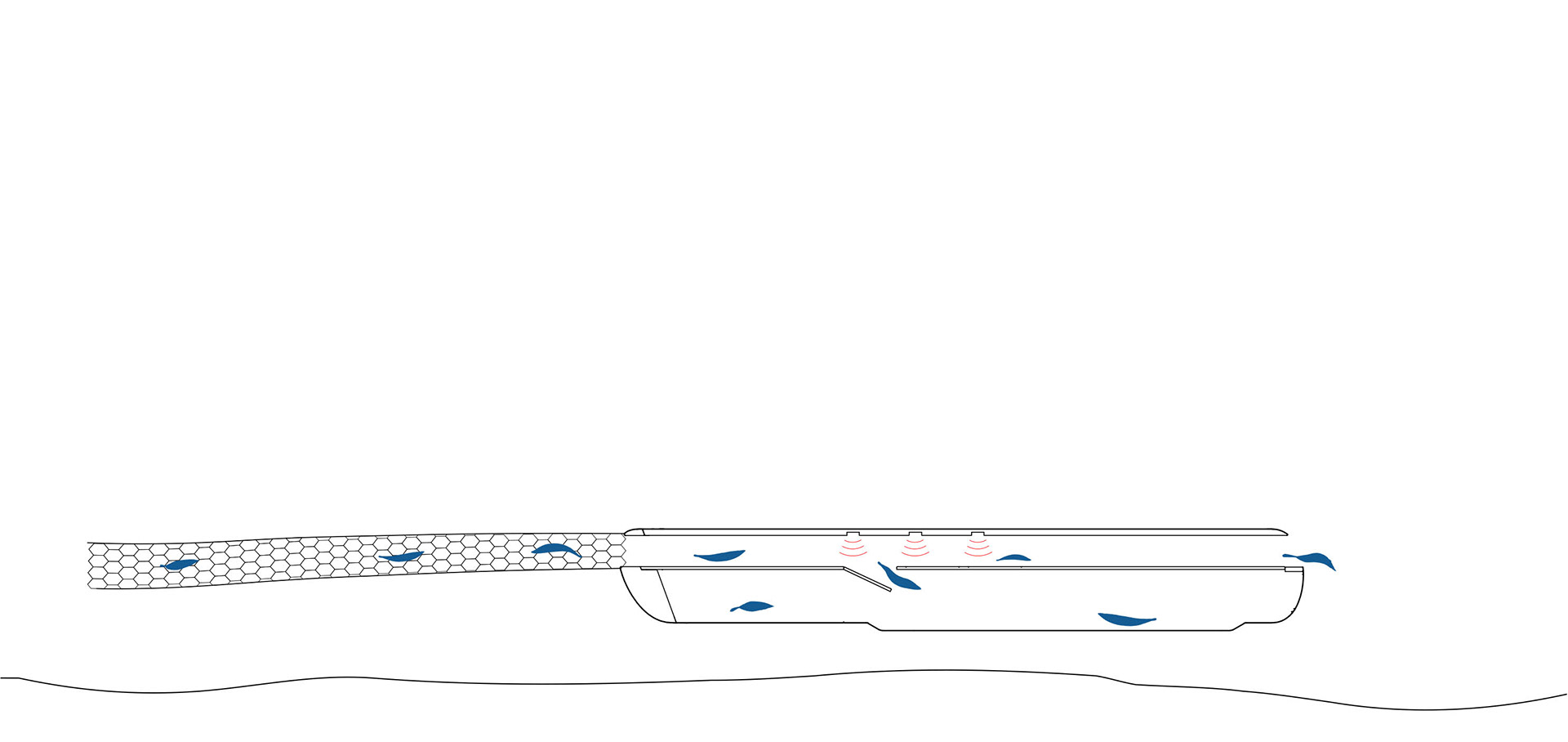
The idea for a more sensitive and modern fishing method was an underwater fishing robot. It operates autonomously based on sensors and artificial intelligence. Instead of a large net catching everything in front of it, a the robot uses sensors to distinguish between catch and bycatch. the catch gets stored in a live stock water tank, the bycatch instantly gets released.
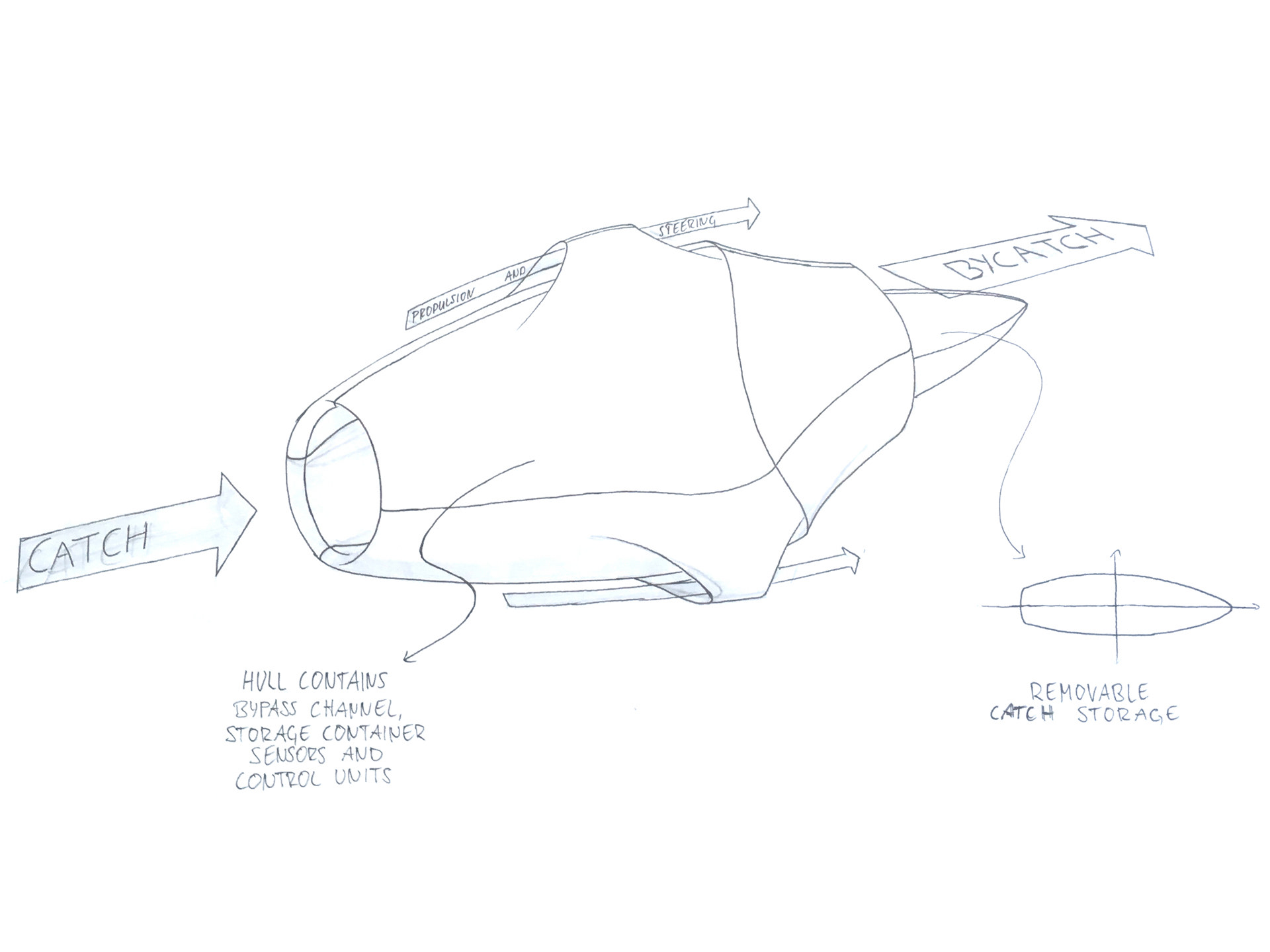
First visualization for an autonomous fishing robot.

CONCEPT
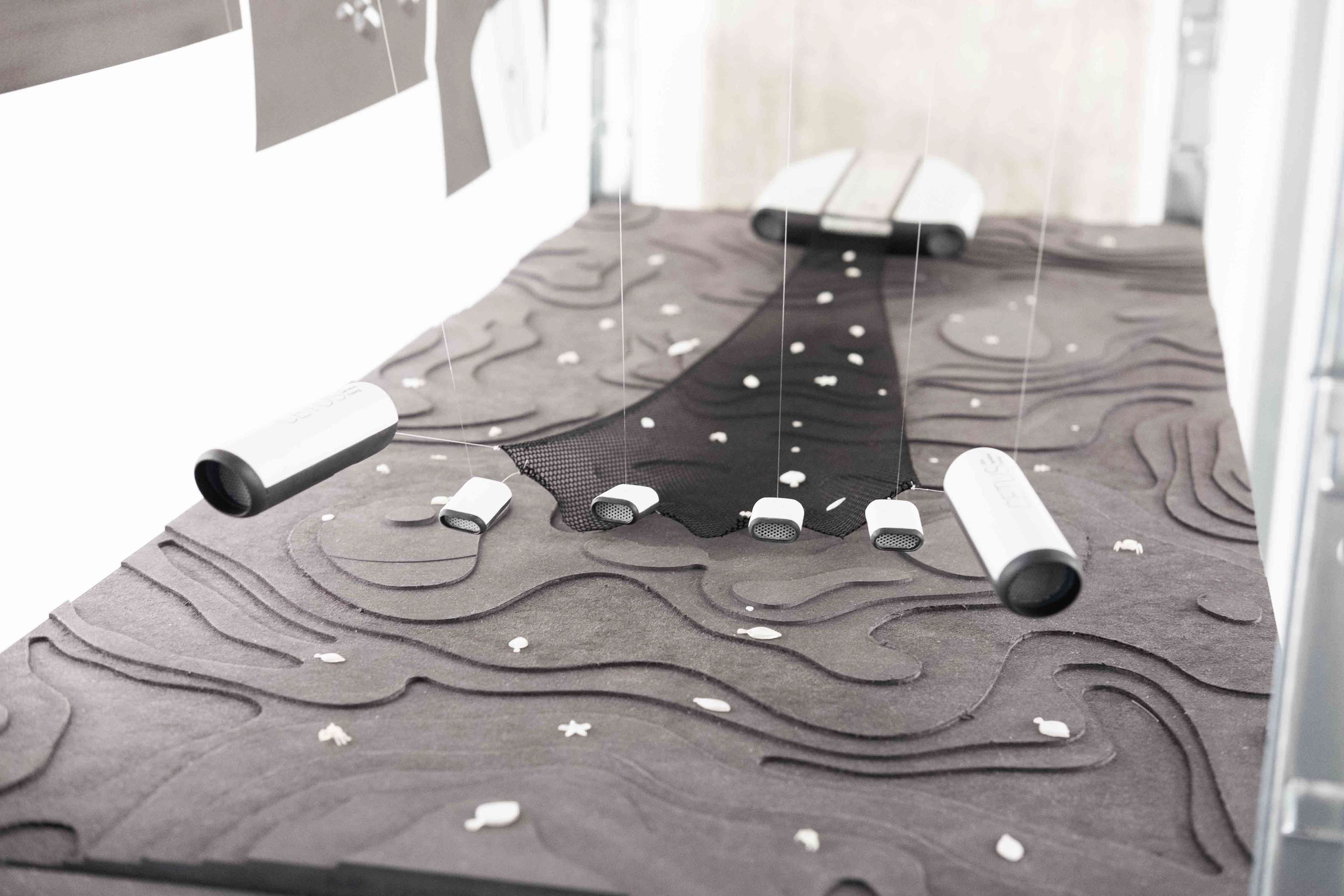
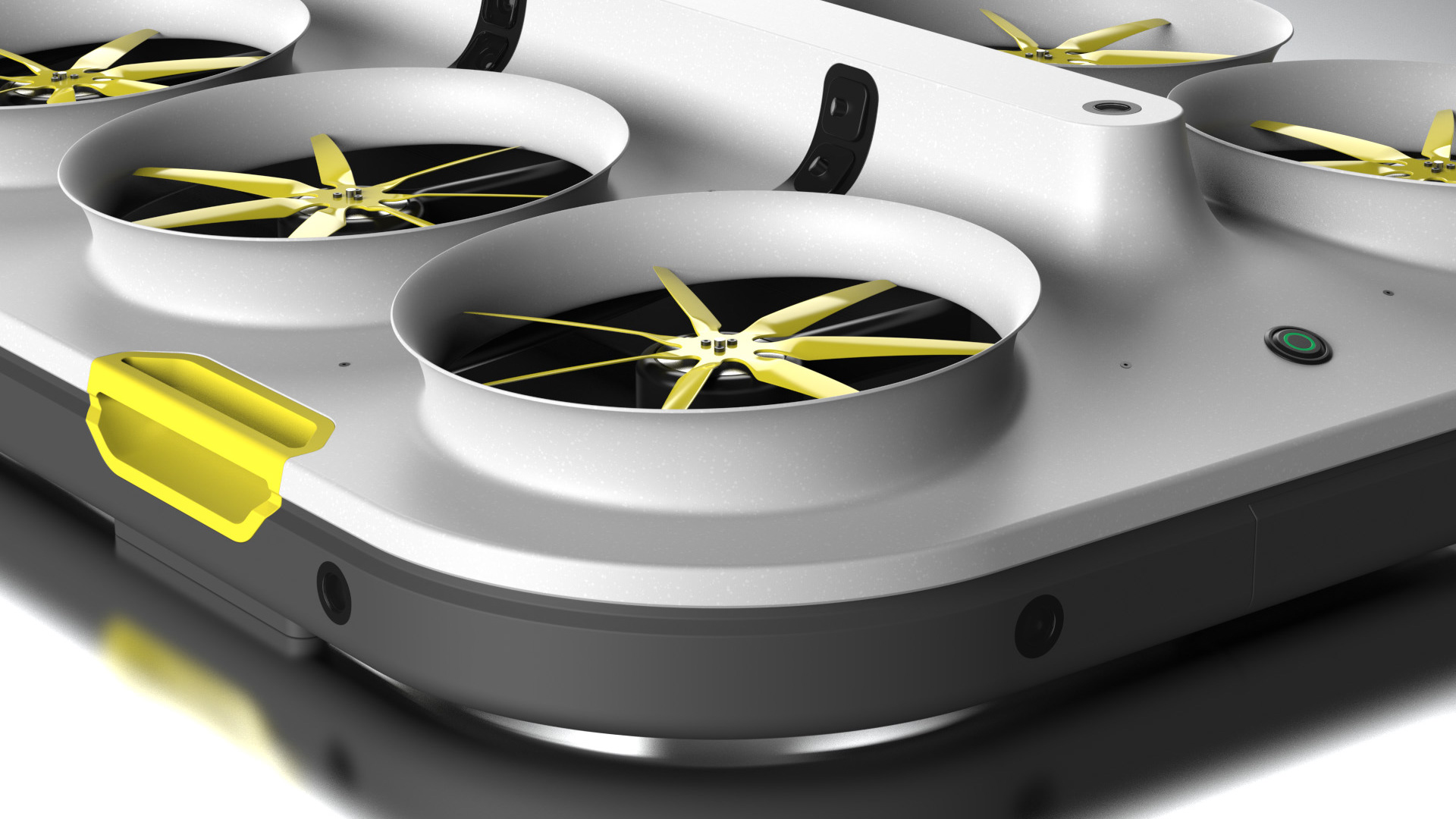
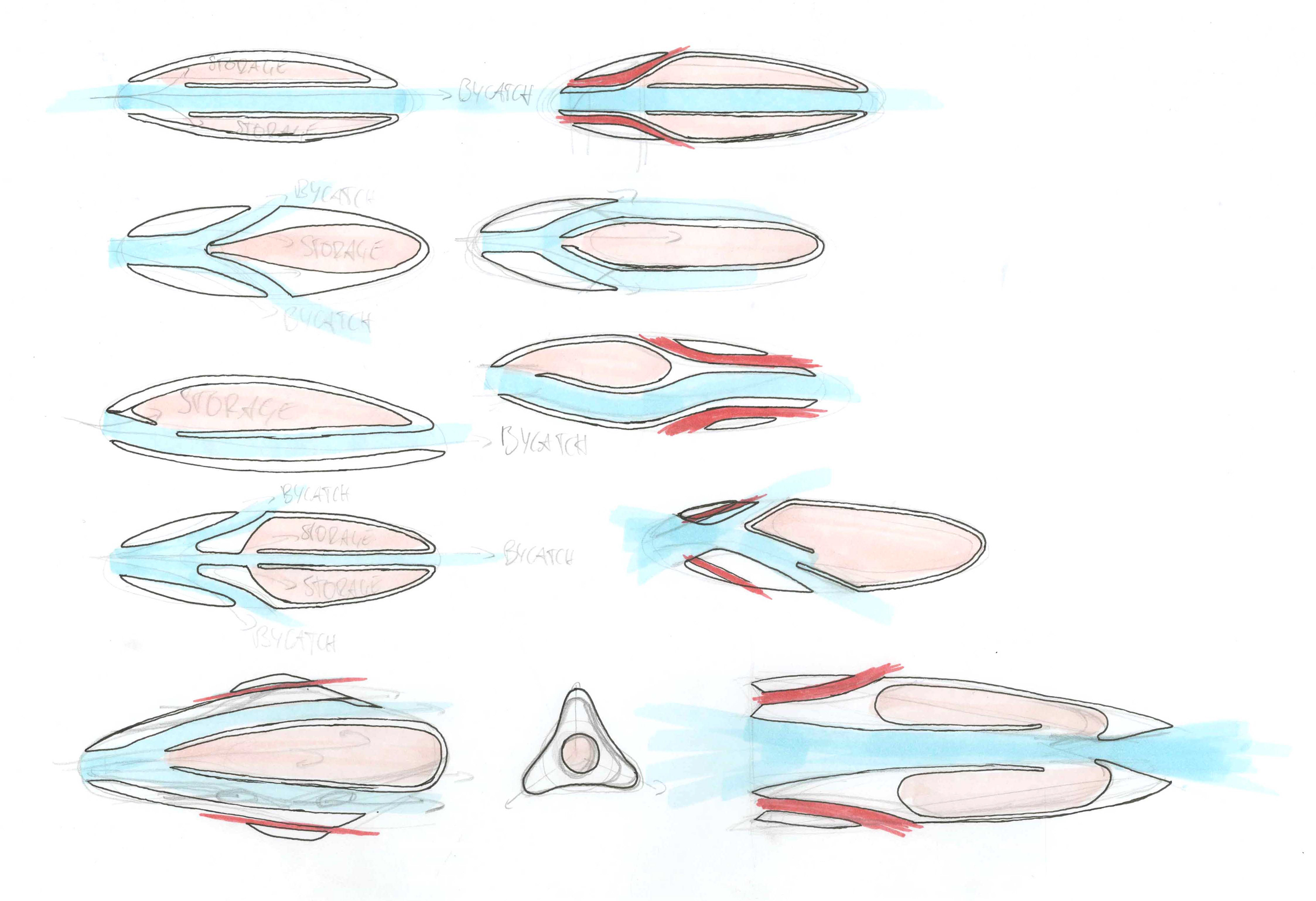
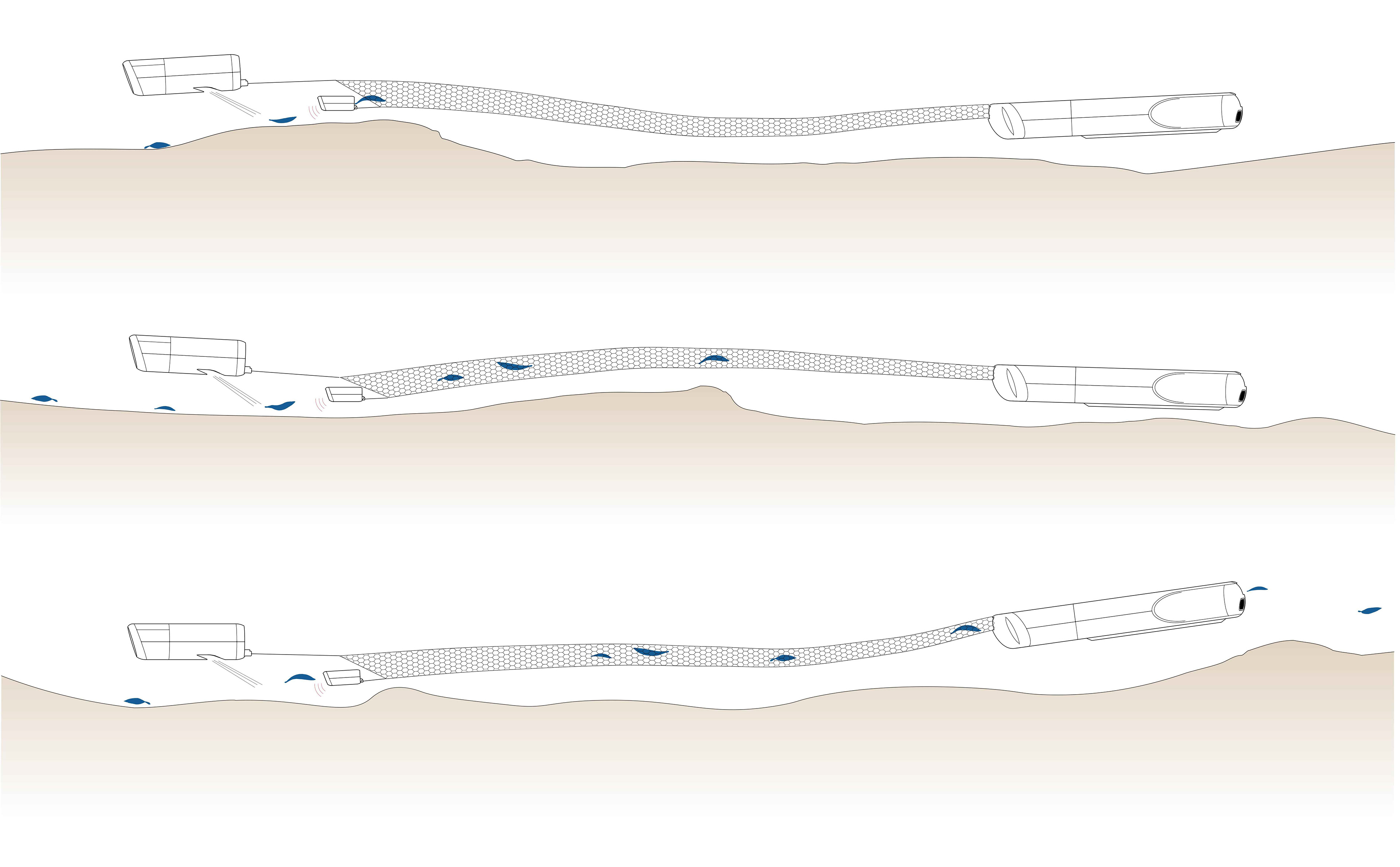
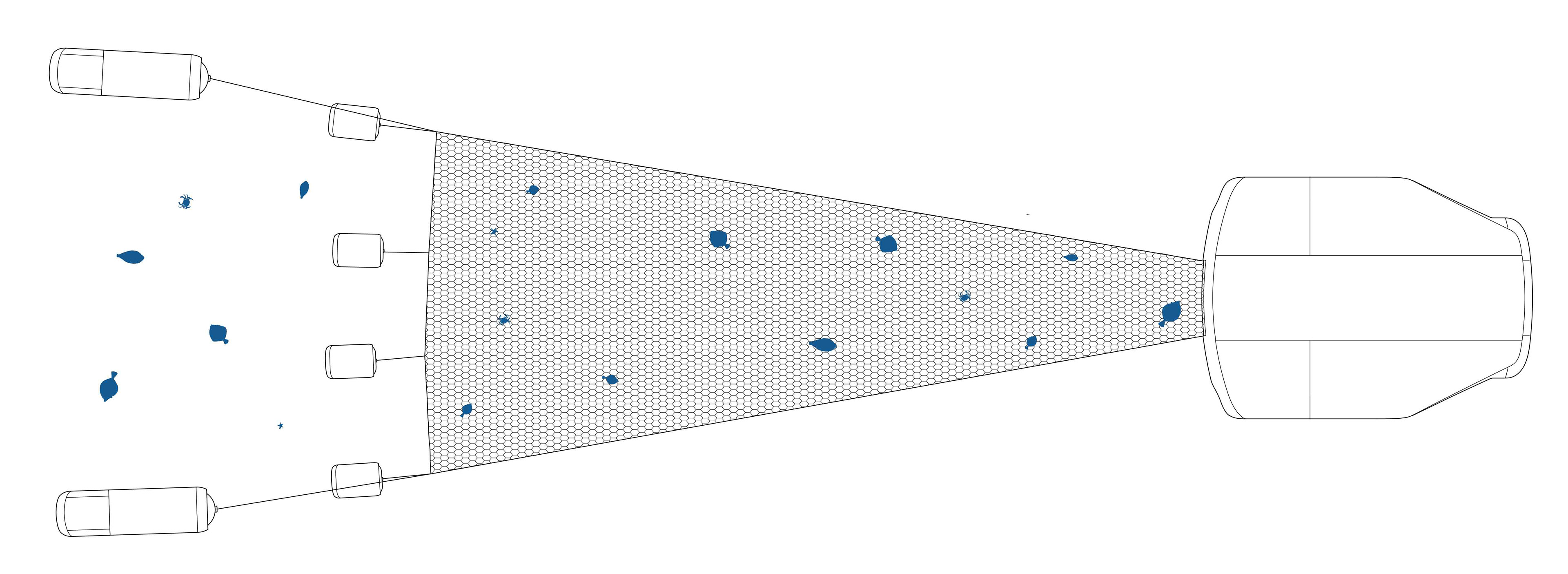
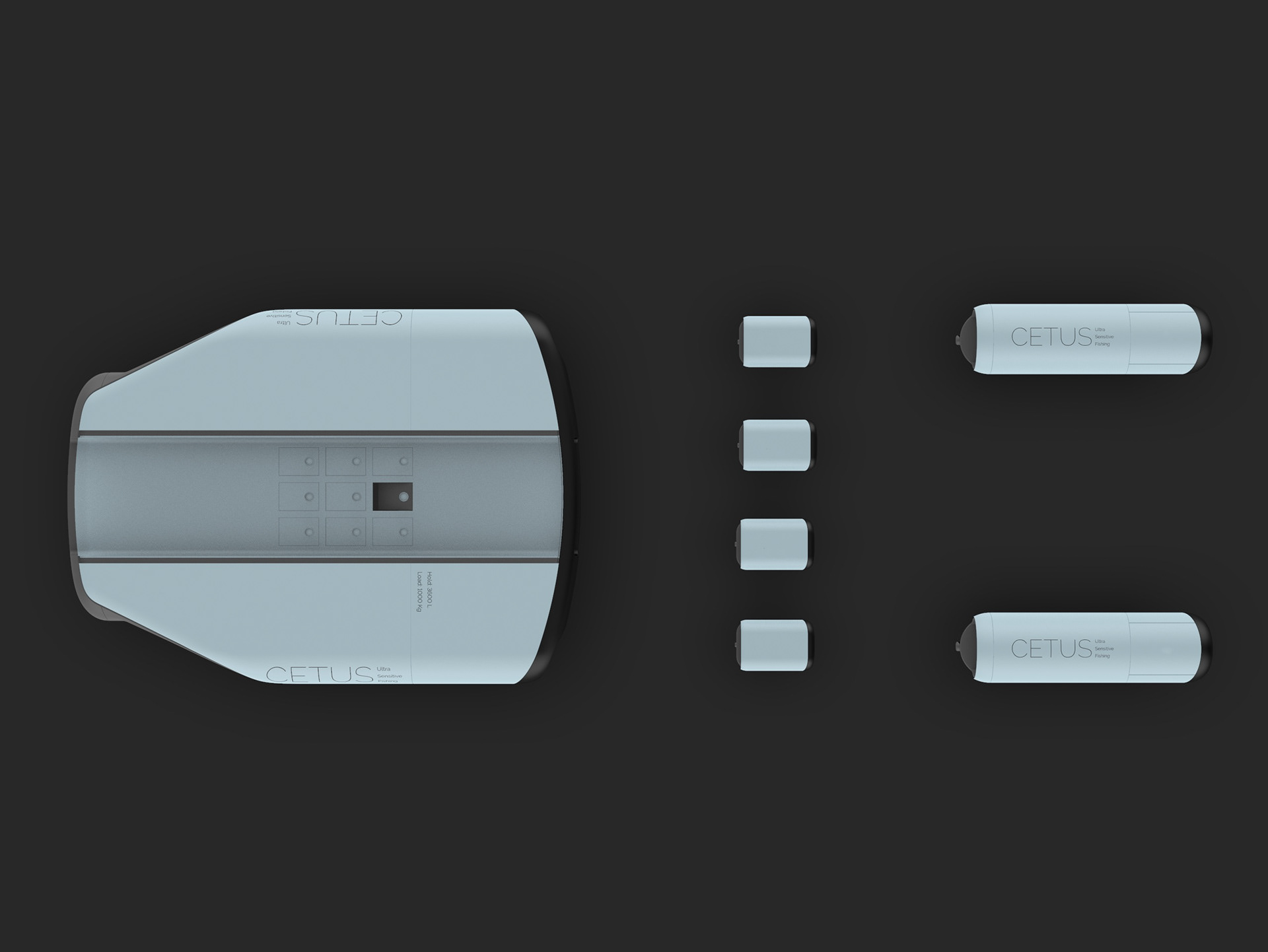
The robot consists of three different units and seven in total. The two Tractors on the front pull the net and the Collector. The water stream of the tractors is partially diverted downwards to lure the catch out of the seabed. The startled fish is then collected by the net which is held as close as possible to the seabed by the four Pilots. The net guides the fish to the collector, where the fish gets sorted and stored. The bycatch leaves the robot at the same place where it was caught. The sensors monitor and analyse the seabed, the water and the biomass over long periods of time.
When the storage is full, the robot collapses, storing the net, the tractors and the pilots inside the bycatch channel. The Collector returns to the mother ship, where the catch is dropped, the batteries are recharged and the collected data is transferred. This data provides the basis for sustainable and responsible fishing.


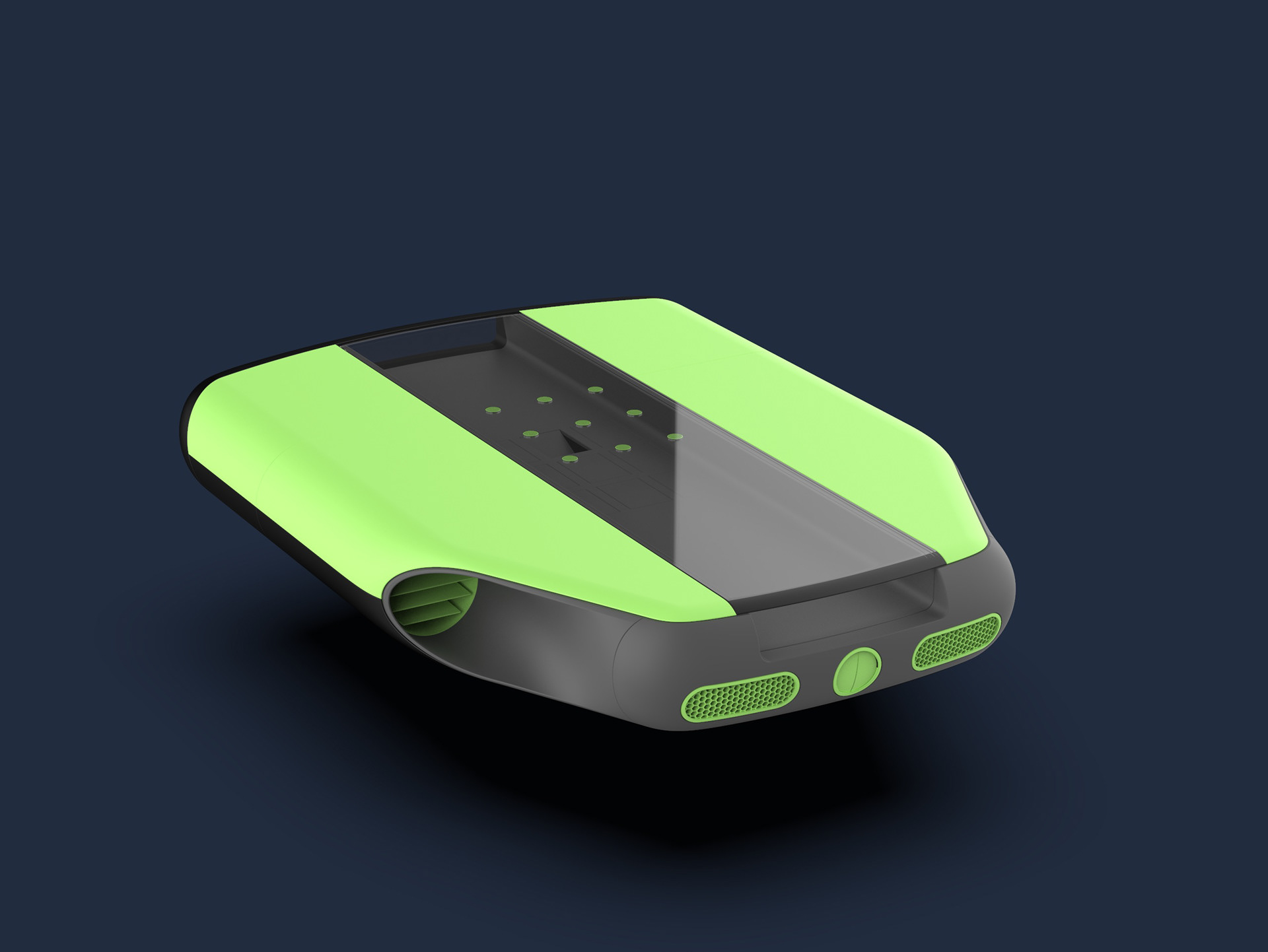
DESIGN
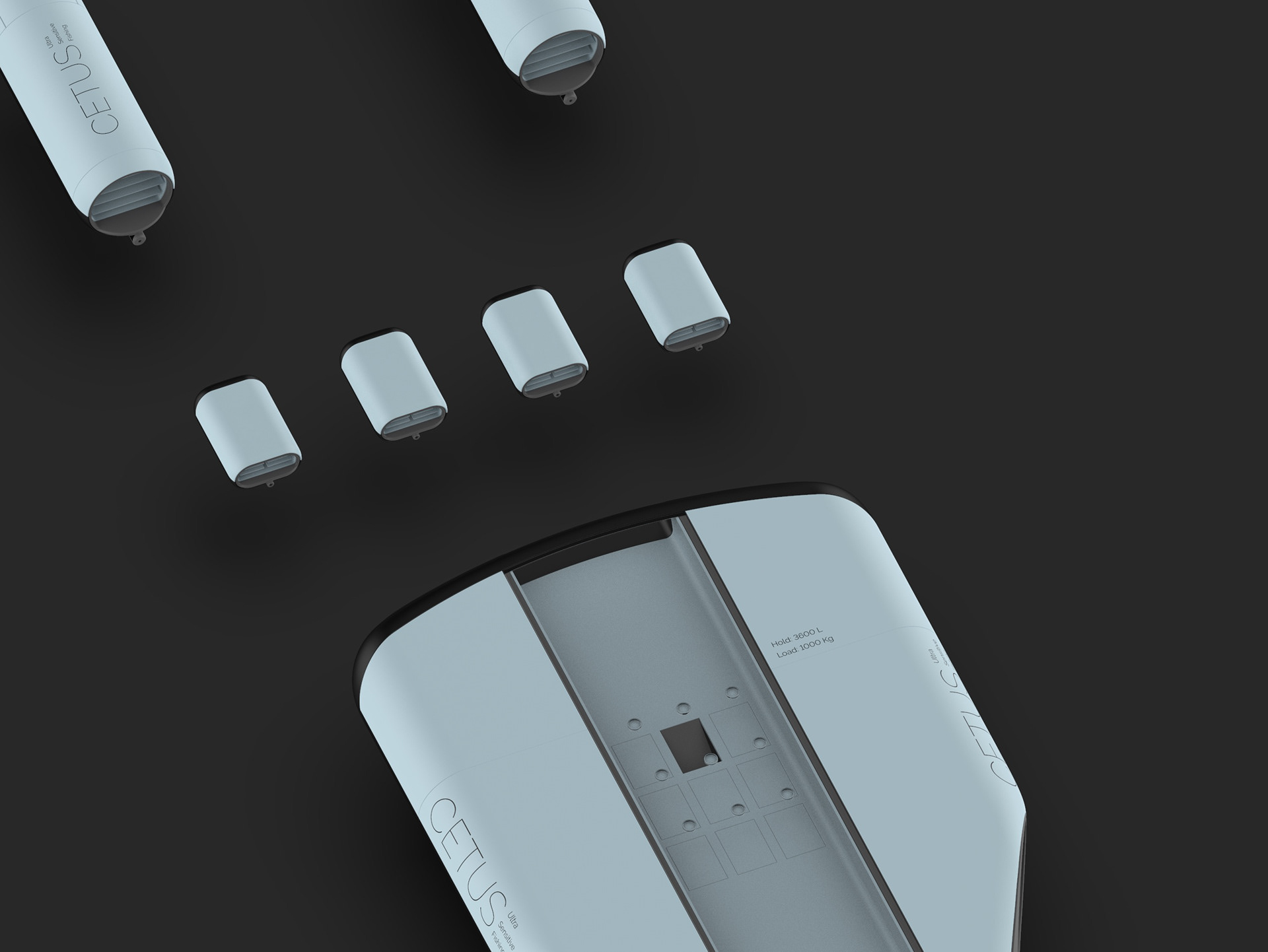

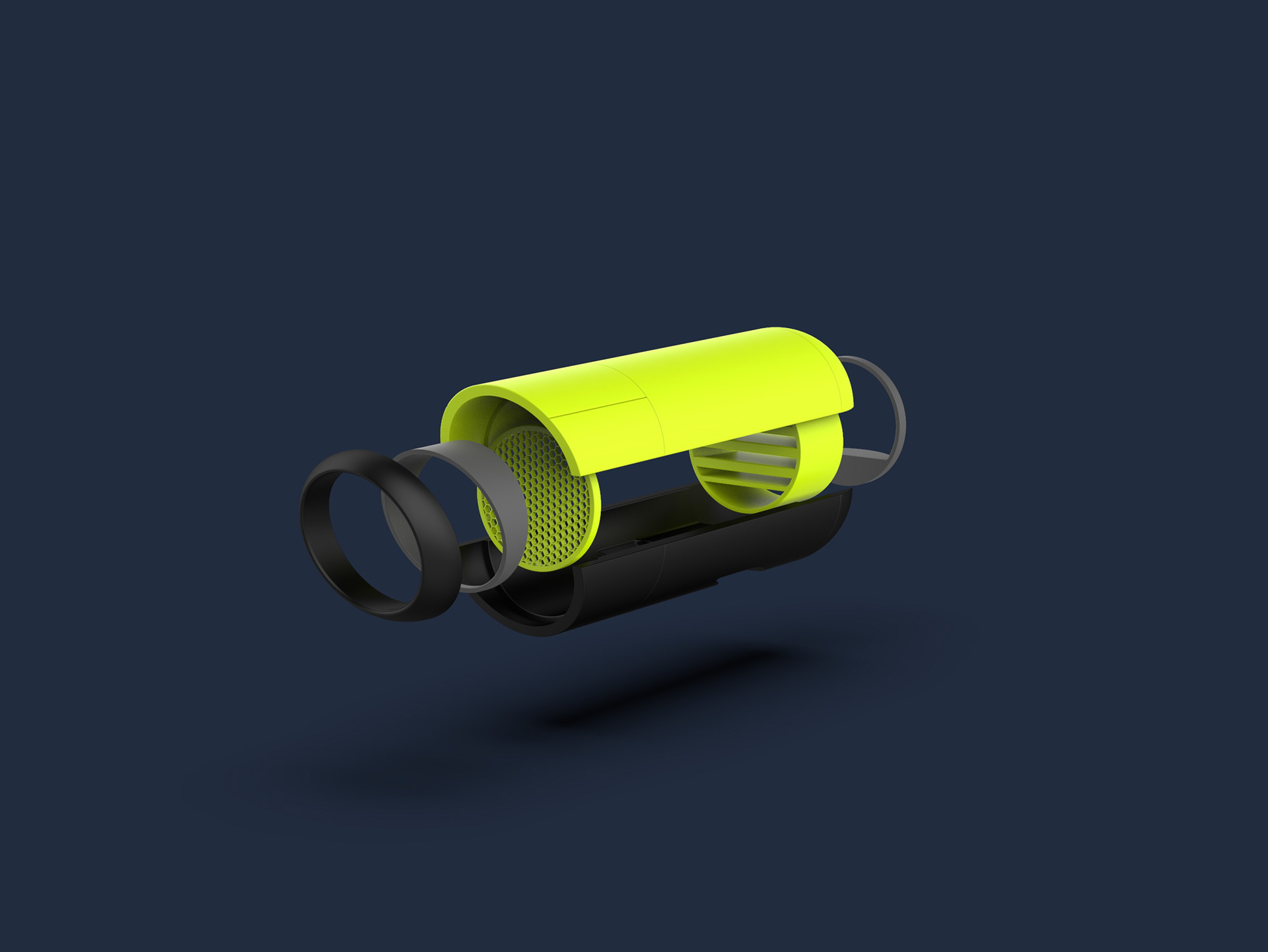

MODEL